


A few of my favorite projects I've worked on!

These three little bots competed in the 2022 Harvard Pacbot Competition, in which robots autonomously navigate a physical pacman maze while avoiding ghosts and devouring power pellets that are projected on the floor. In this project, I— along with two other programmers— implemented both A*-based algorithm to guide the robot's actions, and low-level control code for carrying out those actions using the wheel motors and input from a Gyroscope and distance sensors.
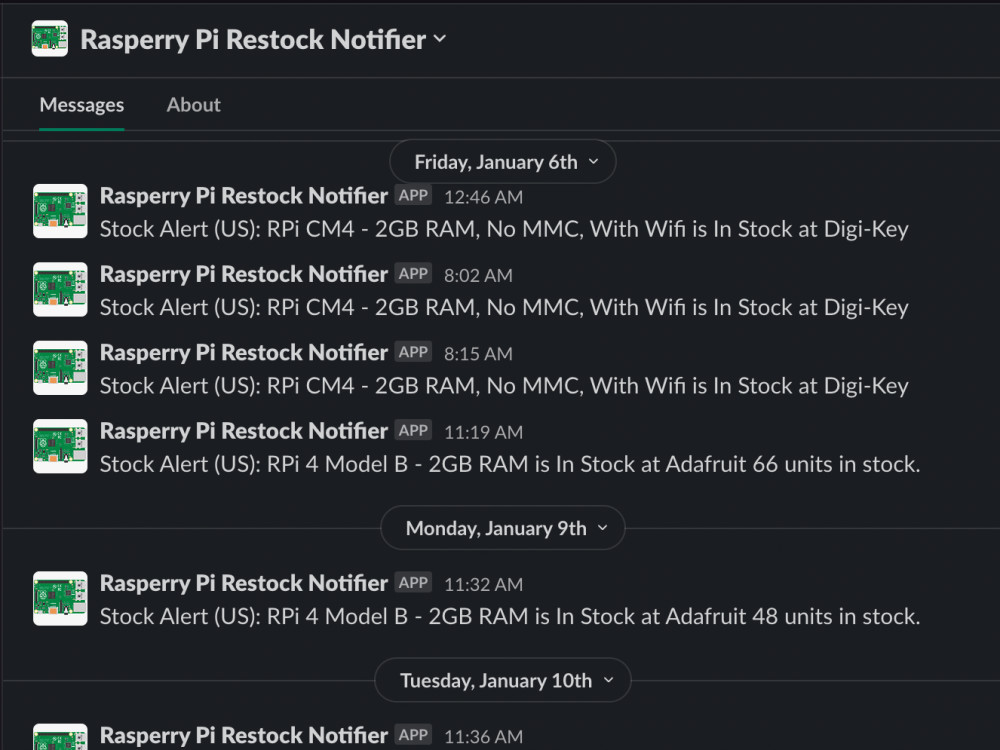
2021 and 2022 saw a major Raspberry Pi shortage, during which many hobbyists relied on DPHacks' Raspberry Pi Locator website and accompanying RSS feed, which updates every time Raspberry Pis were restocked at a list of approved vendors, to get their hands on the chronically out-of-stock microcontrollers. Mostly due to my lack of a Twitter account (the most popular method of receiving these notifications seems to be from a twitter bot) I set up a SlackBot— with a MySQL and Flask-based backend hosted on AWS infrastructure— to poll that RSS feed and send restock notifications to subscribed users for specified Pi types and vendors.
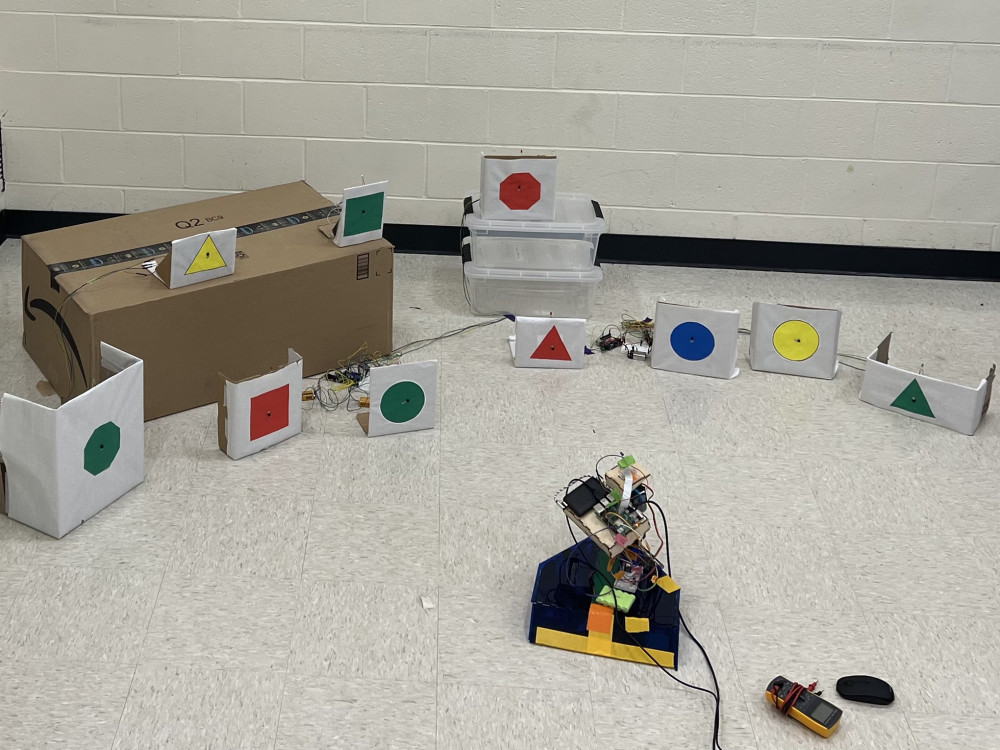
Disappointed with the lack of opportunities for more code-focused roboticists in Tufts Robotics Club's annual Battlebots competition, I started the Computer Vision Laser Space Robot Satellite— or CVLSRS— competition during my first semester on the club's executive board. In the competition, teams write code for a pre-existing robot (running on a Raspberry Pi) to identify and send IR emissions toward specified vision targets. With the goal of mimicking the real-world experience of writing high-level code for an off-the-shelf (or otherwise pre-existing) robot, I wrote an extensive repository of starter code for the competitors, allowing them to control robot movement by broadcasting messages to preexisting nodes over a local server (using the Harvard Undergraduate Robotics Club's Robomodules framework, which somewhat mimcs the behavior of ROS), rather than directly controlling motors and reading from sensors. As the competition's primary founder, I participated in nearly every other aspect of its creation, including designing the game itself (scoring system, rules, etc), leading coding workshops for competitors, and assisting in the design, fabrication, assembly, and testing of both the electrical and mechanical systems of the final robot.